

研究ラボ紹介
継続課題 新規領域開拓
構成論的ニューロメカニクスによる生物の歩行形成メカニズムの解明と応用
研究代表者:青井 伸也 機能創成専攻・生体工学領域
共同研究者:Ilya Rybak Drexel University College of Medicine
共同研究者:Simon Danner Drexel University College of Medicine
脳・身体・環境の相互作用から読み解く生物の優れた運動知能
ヒトや動物は複雑な筋骨格系を巧みに操り、多様な環境で優れた歩行能力を発揮していますが、そのメカニズムの多くは未解明です。生物の歩行は、脳神経系と身体筋骨格系、そして環境との相互作用から形成される複雑な力学現象であり、生物の運動計測のみから全てを明らかにするには限界があります。その一方で、数理モデルやロボットを用いた構成論的な手法は、生物の優れた歩行能力を可能にする制御・力学メカニズムを明確にし、そこから得られる知見は、生物を理解する助けとなるだけでなく、優れた運動機能を有する人工物やヒトの運動を支援する装置の開発にもつながります。
本研究では、ヒトやサル、ネコなど様々な生物の歩行運動を対象に、生物の数理モデルを基盤とするアプローチを展開します。特に、脊髄に存在し、上位中枢からの指令と抹消からの感覚情報を統合して運動指令を形成する中枢パターン生成器(CPG)は、運動のリズムを形成する階層と、筋の活動パターンを決定する階層の2階層から構成されていることが示唆されており、それぞれが歩行の形成に重要な役割を持つと考えられています。本研究では、生物の筋骨格系の数理モデルと、この2階層CPGに基づく神経系の数理モデルを統合した神経筋骨格モデルを構築し、動力学シミュレーションと力学系理論的解析手法を駆使して生物の歩行メカニズムを明らかにし、その成果を医療や福祉、ロボティクスなど様々な分野に応用することを目指します。
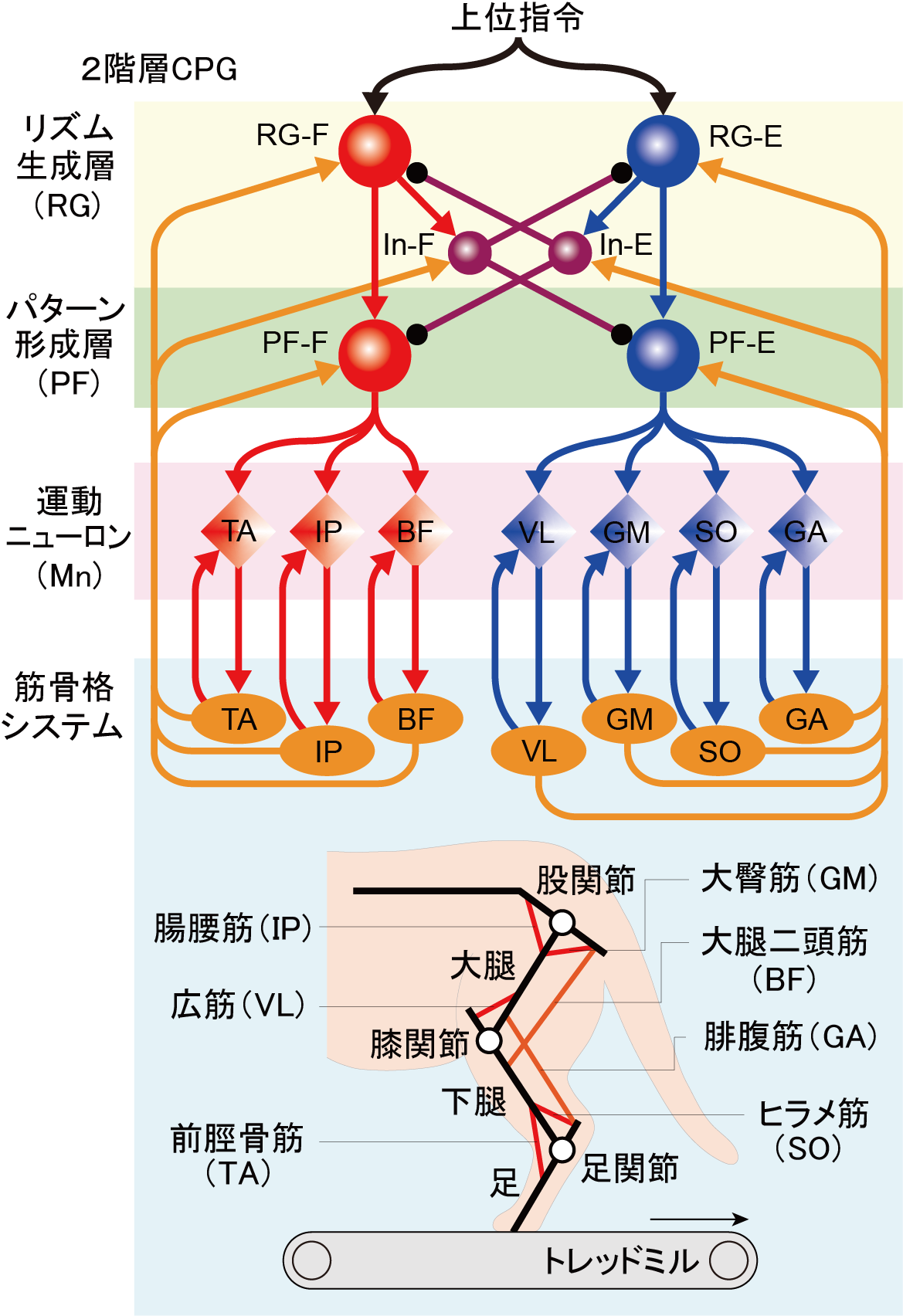
ネコ後肢の神経筋骨格モデル